|
Actualités des industriels

|
12/11/2021 - transitionsenergies.com
Les groupes TotalEnergies et Daimler Truck
ont signé un accord pour participer à la décarbonation du
transport routier de marchandises au sein de l'Union européenne en
développant une filière et un écosystème de poids lourds roulant
à l'hydrogène via des piles à combustible et des moteurs
électriques. Daimler Truck assurera ainsi à ses clients la
capacité de recharger les réservoirs de leurs camions dans un
réseau de stations construit et alimenté par TotalEnergies.
|

|
12/11/2021 - lesnumeriques.com
Apple a officiellement annoncé avoir
recruté Christopher "CJ" Moore, l'ancien responsable du programme
Autopilot chez Tesla. Il sera en charge du développement de la
fameuse voiture autonome made in Cupertino.
|

|
03/11/2021 - ouest-france.fr
Les deuxièmes Assises nationales de
l'automobile ont pris fin ce mercredi 3 novembre 2021 sur le circuit
des 24 heures du Mans. Au menu des débats, la transition
énergétique, pour nos voitures comme pour les bolides du sport
automobile, et les dernières avancées du véhicule autonome. Avant
une conclusion menée par Jean-Dominique Senard, patron de
Renault.
|

|
08/11/2021 - autoplus.fr
L'entreprise Cruise, filiale de General
Motors, se rapproche de la conduite entièrement autonome avec ses
taxis-robots en circulation !
|

|
12/11/2021 - koreaherald.com
The Korea Automotive Technology Institute,
or Katech, has agreed to work together with the UK-based automotive
consultancy firm Horiba Mira on the early commercialization of
autonomous vehicles, the agency said Friday. Katech Director Heo
Nam-yong and Horiba Mira's Chief Commercial Officer Roisin Hopkins
agreed to pursue joint research and development on future vehicle
technologies, signing a partnership agre...
|

|
03/11/2021 - theverge.com
Waymo is bringing its autonomous vehicles to
New York City where they will begin mapping and collecting data about
the city's notoriously congested streets.
|

|
11/11/2021 - siliconangle.com
Autonomous truck software firm Embark Trucks
goes public via SPAC merger but stock falls - SiliconANGLE
|

|
12/11/2021 - greencarcongress.com
Neural Propulsion Systems (NPS), a developer
of autonomous sensing platforms, announced that Dr. Lawrence Burns is
joining as an Executive Advisor. Dr. Burns is the former Corporate
Vice President of Research & Development and Planning at General
Motors (earlier post). He has also advised numerous
companies—including Google Self-Driving Cars/Waymo for...
|

|
15/11/2021 - prnewswire.com
/PRNewswire/ -- StradVision, a leader in
computer vision technology for Autonomous Vehicles and ADAS systems,
is demonstrating its latest technologies on-site...
|

|
06/10/2021 - siecledigital.fr
L'entreprise japonaise a annoncé un plan
d'investissement massif de plusieurs milliards de dollars dans des
technologies d'avenir.
|

|
05/11/2021 - siecledigital.fr
Waymo va cartographier la ville de New York
avec ses véhicules autonomes Siècle Digital
|

|
05/11/2021 - h2-mobile.fr
Evocargo et RTA vont tester des camions
autonomes à hydrogène H2-mobile
|

|
05/11/2021 - usine-digitale.fr
[...] Le concepteur chinois de systèmes
avancés d'aide à la conduite Momenta n'en finit plus de se
capitaliser. Après une levée de 500 millions de dollars en mars
auprès de Toyota, SAIC Motors, Daimler et Bosch, puis l'annonce d'un
investissement de 300 millions de dollar [...]
|

|
11/11/2021 - todayuknews.com
Hyundai's autonomous electric flying taxi
will make its first passenger flight in 2028, with the Korean car
maker announcing an entire new brand that will
|
Actualités des institutionnels

|
12/11/2021 - francemobilites.fr
Parution du guide "Le stationnement vélo en
6 points clés"Le ministère de la transition écologique, en lien
avec les associations de promotion du vélo et les associations de
collectivités propose un guide pour le déploiement du stationnement
vélo en gare.Pour tripler l'usage du vélo dans les déplacements du
quotidien d'ici 2024 (et passer de 3 à 9 % de la part modale), il
est primordial de développer l'intermodalité vélo-train, en
luttant notamment contre le vol des vélos : cela passe par le
déploiement du stationnement sécurisé en gare.
|

|
12/11/2021 - ecologie.gouv.fr
Jean-Baptiste Djebbari, ministre délégué
chargé des Transports, et Agnès Pannier-Runacher, ministre
déléguée chargée de l'Industrie, ont réuni ce jour les acteurs
de la filière logistique à l'occasion du deuxième Comité
Interministériel de la logistique, qui s'est tenu ce jeudi 21
octobre sur le campus d'Euralogistic à Hénin-Beaumont (62), un an
après son installation.
|
|
|
12/11/2021 -
francestrategie.shinyapps.io
L'évolution de la ségrégation
résidentielle en France de 1968 à 2017
Ce projet a été réalisé par France Stratégie dans le cadre de
ses travaux sur l'évolution de la ségrégation résidentielle en
France.Ce module de datavisualisation se décline sous forme de
cartes qui permettent de suivre l'évolution, entre 1968 et 2017, de
la composition sociodémographique des différents quartiers des 55
unités urbaines françaises de plus de 100 000 habitants.
|

|
15/11/2021 - actu-environnement.com
L'article 29 du projet de loi de finances
pour 2022 (PLF 2022), présenté le 22 septembre en Conseil des
ministres, renforce les incitations fiscales à l'utilisation
d'énergies renouvelables (EnR) dans les transports à compter du 1er
janvier 2023. À cet effet, il fait évoluer les paramètres de la
taxe incitative relative à l'incorporation d'énergies renouvelables
dans les transports (Tiruert). Les députés ont adopté ce vendredi
12 novembre un amendement du gouvernement au projet de...
|

|
15/11/2021 -
actu-transport-logistique.fr
La loi n° 2021-1104 du 22 août 2021
portant la lutte contre le dérèglement climatique et le
renforcement de la résilience face à ses effets, dite "loi climat",
a pour objectif de réduire les émissions de gaz à effet de serre
de 40 % d'ici 2030, notamment en prenant en compte certaines des
propositions de la Convention citoyenne pour le climat. Une bonne
partie du texte est consacrée à la transition écologique du
transport de marchandises. Barbara Pompili, ministre de la Transition
écologique nous a accordé un entretien exceptionnel pour expliquer
les enjeux du texte qui inquiète le secteur.
|

|
26/10/2021 - trm24.fr
Londres a décidé d'étendre le périmètre
dans lequel les véhicules les plus anciens et polluants doivent
s'acquitter d'une taxe pour circuler. Pour les poids lourds et
autocars, il leur faudra payer 100 livres (116 euros) par jour. Les
taxis sont, eux, exemptés.
|
|
|
15/11/2021 - vie-publique.fr
La logistique urbaine a déjà fait l'objet
de nombreux travaux et initiatives. Ce rapport cherche à en donner
une vision d'ensemble et à les traduire en propositions d'actions
pérennes et concrètes. Il vise notamment la levée des blocages
relevant des acteurs publics qui pénalisent l'engagement des acteurs
dans des dynamiques plus durables.Tous les acteurs convergent sur
l'ambition de concilier efficacités économique et écologique au
service du développement local. Ils soulignent pour cela
l'importance :d'approches coopératives public/privé. Les
opérateurs privés, traditionnels ou start-ups, possèdent en effet
un rôle majeur, déjà observable au travers des nombreuses
initiatives menées dans les territoires. de communications positives
autour de l'utilité économique et sociale essentielle des
mobilités urbaines de marchandises, généralement dévalorisées
par rapport à celles des personnes.La logistique urbaine mérite une
vision large voire "systémique" pour prendre en compte à la fois
stocks et flux, amont et aval, infrastructures et services. Un
ensemble d'actions pragmatiques doit être mené, pas à pas, adapté
aux diversités tant locales que sectorielles des opérations. Dans
l'articulation de cet ensemble d'actions, le rôle des collectivités
locales est central. Il leur appartient de définir les objectifs
politiques, les méthodes et les étapes, et adapter les bonnes
pratiques publiques aux réalités de leurs territoires avec des
acteurs économiques.Les travaux de la mission visent à donner des
repères issus de nombreux travaux académiques et initiatives
locales et compléter les boîtes à outils qui permettraient des
interventions plus efficaces. A ce titre, prioritairement
:Accompagner l'engagement des collectivités par la mise en place
d'une organisation leur permettant d'échanger, de former des
compétences, de promouvoir les meilleures pratiques et de faire
évoluer le corpus réglementaire en lien avec l'Etat. Faciliter
l'acquisition et l'exploitation de données sur la logistique
urbaine, à trois niveaux : la mise en transparence des données
publiques (aires et horaires de livraisons) ; la formation
d'observatoires nationaux et locaux de la logistique urbaine
organisés autour de structures déjà existantes ; selon des
modalités à définir et expérimenter, le partage de données
privées intégrant l'ensemble des acteurs. Donner aux espaces
logistiques urbains (entrepôts, points relais, etc.) une place plus
importante, éventuellement prescriptive, dans les documents
d'aménagement et d'urbanisme à toutes les échelles. Faciliter la
transition vers des flottes de véhicules plus propres, qui se doit
d'être en même temps ambitieuse et réaliste. Mettre à disposition
des collectivités des nouveaux outils de gestion du stationnement
pour les livraisons en leur offrant la capacité, par voie
législative, de dépénaliser les aires de livraison et ainsi
harmoniser les contrôles et faciliter les expérimentations.
|

|
15/11/2021 - maire-info.com
|

|
10/11/2021 - unidivers.fr
Paris Présentation des appels à projets
2022 sur le transport maritime et fluvial Ministère de
l'Enseignement supérieur, de la Recherche et de l'innovation, le
mardi 30 novembre à 11:00 Ministère de l'Enseignement
supérieur,de la Recherche et de l'innovation 2021-11-30 Ministère
de l'Enseignement supérieur,de la Recherche et de l'innovation mardi
30 novembre 2021
|

|
12/11/2021 -
ville-rail-transports.com
Quel avenir pour la logistique urbaine ?
Dans leur rapport remis le 21 octobre aux ministres Jean-Baptiste
Djebbari et Agnès Pannier-Runacher, l'ancienne ministre et actuelle
présidente de France Logistique, Anne-Marie Idrac, le maire adjoint
de Toulouse Jean-Jacques Bolzan et la présidente du port de
Strasbourg Anne-Marie Jean mettent en avant 32 propositions pour
développer des Continue reading The post Un rapport sur la
logistique urbaine propose de donner un rôle central au GART
appeared first on Ville, Rail et Transports .
|

|
28/10/2021 - tiresandparts.net
Hyundai Motor Company marked its steady
climb in Interbrand's Best Global Brands 2021 Rankings, placing 35th
overall, up one notch from 2020. According to Interbrand's
comprehensive assessment, Hyunda
|

|
11/11/2021 - transitionsenergies.com
Il n'y a pas que Tesla à susciter
l'engouement des investisseurs et surtout des spéculateurs à Wall
Street. Rivian, un constructeur américain de pick-up, SUV et autres
camionnettes électriques qui vient seulement de livrer il y a deux
mois ses 150 premiers véhicules, a vu sa valorisation boursière
dépasser le 10 novembre, jour de son introduction en Bourse, 90
milliards de dollars!
|

|
03/11/2021 - automobile-propre.com
La Chine suit un programme pilote : 11
villes seront équipées de stations d'échange de batteries pour
véhicules légers et lourds électriques.
|

|
05/11/2021 -
meilleure-innovation.com
Les motos électriques se positionnent comme
étant le futur de la mobilité. Elles ne cessent d'innover et de
proposer des nouvelles fonctionnalités. Alors qu'aucune moto
électrique n'existaient sur le marché il y a 20 ans, aujourd'hui on
en trouve un grand nombre et les moyens mis en œuvre pour produire
le véhicule de demain sont [...]
|
Transports publics autonomes

|
05/11/2021 - usine-digitale.fr
Cruise commence à déployer son service de
robots taxis, sans opérateur de sécurité, à San Francisco. Pour
l'instant, seuls ses employés et quelques personnes sélectionnées
en amont peuvent utiliser ce service. Il est gratuit pour le moment
puisque la filiale de General Motors n'a pas encore demandé
l'autorisation pour le commercialiser.
|

|
11/11/2021 - nicematin.com
Et si vous alliez au restaurant ou faire vos
courses en voiture autonome? C'est ce que pourront bientôt tester
les employés de la technopole Sophia Antipolis. Si cela fait des
années que la Technopole planche sur la voiture de demain dans le
cadre du projet ENA (Expérimentation de Navettes Autonomes), géré
par l'université Gustave Eiffel de Paris, c'est la première fois
que ce véhicule autonome sera " testé au milieu de la circulation
quotidienne ".
|

|
29/10/2021 - lesechos.fr
Cette année, les transports en commun
français devraient encaisser une nouvelle chute de recettes
d'environ 680 millions, dont une grosse moitié pour
l'Ile-de-France. Présidente de l'UTP, Marie-Ange Debon anticipe un
retour à la normale vers 2022.
|

|
25/10/2021 - francebleu.fr
Une majorité de Tourangeaux prennent leur
voiture pour aller de leur domicile à leur travail. Pourtant, très
peu partagent leur trajet avec d'autres personnes. Tours Métropole
lance donc une réflexion pour inciter davantage au
covoiturage;
|
|
|
25/10/2021 - smartcitymag.fr
La logistique urbaine, et notamment la
problématique du dernier kilomètre, fait actuellement
l'objet de plusieurs expérimentations incluant des
véhicules autonomes. Après Montpellier, Troyes se lance
dans l'aventure avec un modèle appelé à
s'insérer dans le flux de la circulation.
|

|
15/11/2021 - lantenne.com
Le rail-route est le principal levier du
développement du fret ferroviaire, selon le Groupement national des
transports combinés. Les pouvoirs publics semblent du même avis, si
l'on se fie au...
|

|
03/11/2021 - lesechos.fr
Avec la crise sanitaire et le télétravail,
les usagers des transports en commun ont diminué leurs
déplacements. Pour développer les mobilités tout en les
décarbonant, le développement des plateformes digitales de MaaS
facilitera le passage d'un mode de transport à l'autre. Ce qui va
impacter l'urbanisme.
|

|
25/10/2021 - flotauto.com
Première en France, la RATP, associé au
spécialiste de l'IoT Lacroix, a fait rouler un bus autonome en
conditions réelles de circulation.
|
Train autonome et ferroviaire
|
|
12/11/2021 -
patrick.lacour@ifsttar.fr
Le plan d'investissement pour le fret
ferroviaire prévoit 250 millions d'euros pour les installations
terminales, 160 M€ pour la modernisation des voies de service et
installations de tri des wagons, 250 M€ pour des évolutions de
gabarit, 50 M€ pour le développement d'axes accueillant des trains
lourds et longs, 205 M€ pour la modernisation des petites lignes de
fret et 85 M€ pour la numérisation du fret.
|
|
|
12/11/2021 - androidfun.fr
Verified Market Research® a récemment
publié une nouvelle étude sur le marché Trains autonomes avec des
données statistiques dans des tableaux, des camemberts, des
graphiques et des figures pour fournir une meilleure compréhension
du marché. Le rapport sur le scénario de développement actuel et
les tendances émergentes du marché. Le rapport de recherche fournit
une évaluation complète du marché et offre une perspective
prospective concernant les tendances du marché, les facteurs de
croissance, les faits et les données de marché validées par
l'industrie. L'étude de recherche offre une estimation précise des
prévisions du marché Trains autonomes jusqu'en 2028. Le rapport
comprend également une analyse complète du paysage concurrentiel
avec un profil complet des principaux concurrents.
|

|
08/11/2021 - mediarail.wordpress.com
Se battre, tous les jours. Ces derniers
temps, des tests importants en matière de train autonome ont été
entrepris, avec succès comme sur une très courte section à
Hambourg. Si le train intelligent est l'avenir, cela ne signifie pas
qu'il faut faire l'impasse sur la modernisation de l'infrastructure
et la construction des lignes nouvelles.
Au cours des cinq dernières décennies, les chemins de fer du monde
entier ont subi d'importantes réductions budgétaires de la part des
gouvernements, ce qui a limité leur capacité à investir dans les
infrastructures ou à maintenir des normes de service élevées. La
concurrence féroce de la route, qui a l'avantage de la livraison
porte-à-porte, a rajouté davantage de peine.
|

|
08/11/2021 - boursorama.com
Deux jours avant la publication de ses
résultats semestriels, Alstom (+1,05% à 31,71 euros) est venu
apporter une bonne nouvelle aux investisseurs. Le contrat égyptien
annoncé en juin dernier par Bruno Le Maire a été signé. Il
prévoit la fourniture par Alstom de 55 trains de 9 voitures
Metropolis et un contrat de maintenance de 8 ans. Au total, le
contrat atteint la coquette somme de 876 millions d'euros. Cette
commande vise à moderniser la ligne 1 du métro du Caire, un projet
financé par le gouvernement français.
|

|
12/11/2021 -
actu-transport-logistique.fr
Le coût de la rénovation des lignes de
desserte fine du territoire pourrait être allégé en prolongement
du lancement du projet ARTT. L'économie réalisée pourrait être
comprise entre 30 et 40 % par rapport aux conditions actuelles.
Cette nouvelle approche de la régénération des voies pourrait,
cependant, ne voir le jour que d'ici sept ans.
|

|
15/10/2021 - aragondigital.es
Adif, Algeciras y Aragón firman el
protocolo para lanzar la autopista ferroviaria en 2024 - Aragón
Digital
|

|
12/11/2021 - ec.europa.eu
Afin que les systèmes ferroviaires soient
pleinement harmonisés et interopérables dans l'UE d'ici au 1er
janvier 2026, la Commission cherche à mettre progressivement fin aux
règles nationales exigeant des signaux indiquant la queue du train
autres que deux plaques réfléchissantes sur les trains de
marchandises. Cette initiative modifie les règles de l'UE relatives
à la suppression progressive de ces signaux indiquant la queue du
train, conformément à la spécification technique
d'interopérabilité relative au sous-système "Exploitation et
gestion du trafic" du système ferroviaire (STI OPE) actuellement en
vigueur, tout en garantissant l'harmonisation au sein de l'UE avant
la date butoir susmentionnée.
|
|
12/11/2021 -
ville-rail-transports.com
Métros automatiques : un challenge
financier, organisationnel et technique A Rennes, l'an prochain, la
ligne B entre en service. Elle concrétise un saut d'importance dans
l'épopée des métros automatiques : nouveau mode de guidage,
nouveaux automatismes, et nouveau matériel roulant. Avec
discernement, Rennes a choisi, pour l'extension de son réseau, le
nec plus ultra de Continue reading
|

|
19/10/2021 - lesechos.fr
Depuis deux ans, les constructeurs du
ferroviaire, Alstom en tête, et les entreprises sous-traitantes
cherchent à mieux travailler ensemble. Le dispositif consiste à
regrouper des PME sur un projet précis tout en les accompagnant pour
améliorer leur performance industrielle. Devant le succès,
l'initiative va essaimer dans toute la France avec dix-huit grappes
prévues d'ici à trois ans.
|

|
12/11/2021 - lemoniteur.fr
La Société du Grand Paris a attribué à
Chantiers Modernes Construction (Vinci Construction) la construction
de plusieurs bâtiments techniques...
|

|
05/11/2021 -
ville-rail-transports.com
Très répandu en Scandinavie, le " Low
Entry " fait désormais des émules en France aussi. Ce concept
singulier allie les avantages de l'autobus pour l'accessibilité à
ceux de l'autocar pour la simplicité de la chaîne cinématique et
le confort routier. Moins cher qu'un véhicule dérivé d'un modèle
urbain, il pourrait à terme devenir incontournable. Continue reading
The post Boom des mobilités interurbaines. Le pari du bus
Low Entry appeared first on Ville, Rail et Transports .
|

|
05/11/2021 -
ville-rail-transports.com
La stratégie nationale pour le fret
ferroviaire a été présentée mi-septembre par le gouvernement.
Basée sur l'aide des pouvoirs publics et des engagements des
professionnels, elle suscite de nouveaux espoirs. C'est un énième
plan de sauvetage pour le fret mais il semble mieux répondre, cette
fois, aux attentes du secteur. Ce plan, " Nouvelle stratégie
nationale Continue reading The post Faut-il croire aux promesses du
fret ferroviaire ? appeared first on Ville, Rail et Transports .
|
|
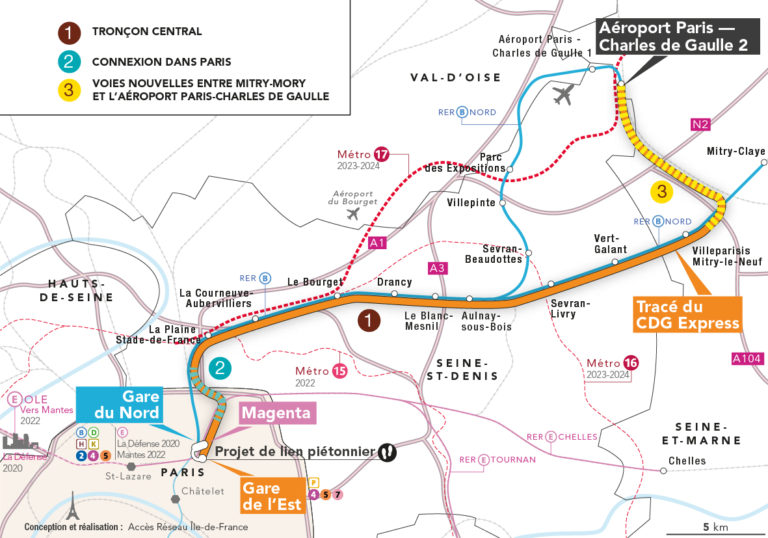
05/11/2021 -
ville-rail-transports.com
Initialement attendu fin 2025, le train
devant relier en une vingtaine de minutes l'aéroport de CDG et la
gare de Paris Est ne roulera pas avant la fin 2026, a indiqué jeudi
Ile-de-France Mobilités (IDFM). L'exécutif a fait part de son choix
lors d'un comité de pilotage de l' "axe nord " – le faisceau de
voies Continue reading The post L'ouverture de CDG Express
reportée à fin 2026 appeared first on Ville, Rail et Transports .
|

|
05/11/2021 -
ville-rail-transports.com
Trois ans après avoir franchi le cap
symbolique des 1 000 kilomètres de lignes en service dans le
monde, les métros automatiques sont portés par une dynamique de
croissance. Selon l'UITP, l'extension de ces réseaux devrait se
poursuivre et la barrière des 2 000 kilomètres pourrait être
dépassée d'ici 2023. Face au défi des déplacements quotidiens
d'une Continue reading The post L'accélération planétaire des
métros automatiques appeared first on Ville, Rail et Transports .
|

|
06/11/2021 - latribune.fr
Après des mois de tractations, la Chambre
des représentants a voté en faveur du plan d'investissements de
1.200 milliards de dollars, pour rénover les infrastructures, déjà
approuvé par le Sénat. Néanmoins, Joe Biden n'est pas parvenu a
obtenir de vote pour son plan d'investissements de 1.750 milliards de
dollars, dans les domaines social et écologique. Un vote est
désormais espéré avant fin novembre.
|

|
01/11/2021 - lesechos.fr
Les meilleurs spécialistes en intelligence
artificielle planchent sur la gestion des flux de véhicules en
ville, mais ils ne font souvent que déplacer le problème. Limiter
l'accès des voitures aux centres urbains reste pour l'heure la
meilleure solution pour empêcher les bouchons.
|
|
|
15/11/2021 - theicct.org
(English version here.) Ce rapport examine
la quantité, le type et la répartition des infrastructures de
recharge qui seront nécessaires pour soutenir la transition
électrique des flottes de voitures particulières, de taxis, de
véhicules de transport avec chauffeurs (VTC) et de véhicules
utilitaires légers jusqu'en 2035 afin de mettre la France sur la
voie de 100% des ventes
|

|
07/10/2021 - trm24.fr
Le projet de routes électriques serait-il
la solution pour palier le problème des batteries sur les
utilitaires et les camions électriques ? Un poids lourd de 40
tonnes est équipé de 4 à 5 tonnes de batteries électriques (1 200
kWh) pour parcourir 700 kilomètres. Le concept de route électrique
permettrait de réduire par "3 voire 4 le poids des batteries.
|

|
04/11/2021 - marketscreener.com
Terranet AB , developers of advanced
driver-assistance software that specifically addresses safety and
comfort through precise, fast, and intelligent sensor... November 12,
2021
|
|
10/11/2021 - la-croix.com
Pilotée par Hynamics, une filiale d'EDF, la
station Auxhygen est le plus grand site de production et distribution
d'hydrogène renouvelable de France. Bus, camions et trains s'y
approvisionneront.
|

|
20/10/2021 - lemondedelenergie.com
Le verdissement des solutions de mobilités
est aujourd'hui un axe prioritaire des stratégies européennes de
décarbonation. L'hydrogène en tête.
|
|
|
12/11/2021 - ieeexplore.ieee.org
Hydrogen-integrated transportation and power
systems (HTPS will become an important way to achieve the goal of
carbon neutrality. As an important coupling unit of HTPS, the
business mechanism of hydrogen fueling stations (HFS is an important
starting point for improving system economy and promotion value. This
paper proposed an interaction mechanism between HFS and HTPS and
hydrogen and fuel cell EVs (HFEVs in smart cities for HFS pricing
strategies. First, we construct the framework of the HTPS interaction
mechanism based on the basic combination of HTPS. Then, the
interactive model of HTPS is constructed, including the scheduling
model of HTPS, the pricing model of HFS and the response model of
HFEVs. Finally, an HTPS system is constructed based on the improved
IEEE 33-node power distribution system for simulation and analysis.
The results show that the interaction mechanism and pricing strategy
can improve the economics of HTPS and HFS, the operating cost of HTPS
has been reduced by approximately 5.57%, the operating income of HFS
has increased by approximately 4.17%.
|

|
04/11/2021 - benzinga.com
The Green Hydrogen Catapult, a coalition of
green hydrogen leaders, convened with the support of the UN High
Level Champions for Climate Action and hosted ...
|

|
10/11/2021 - fredzone.org
À la fin du mois dernier, Tesla a signalé
un problème avec son logiciel de conduite autonome à la National
Highway Trafic Safety Administration (NHTSA). Le problème concerne
officiellement près de 12 000 véhicules. Le moment du rappel est
vraiment mal choisi pour l'entreprise. Cela pourrait même
représenter un tournant dans les relations tendues entre Tesla
[…]
|

|
13/11/2021 - mostwiedzy.pl
Human safety is one of the most critical
factors when a new technology is introduced to the everyday use. It
was no different in the case of Autonomous .....
|

|
13/11/2021 - link.springer.com
The driving assistance system is going to be
true shortly. Therefore, developing a robust sub-component system,
such as crosswalk detection, is necessary to support the drivers and
prevent accidents....
|

|
27/10/2021 - siecledigital.fr
Durant quatre ans, le projet L3Pilot a
permis d'établir une bibliothèque commune de scénarios pour le
développement des véhicules autonomes.
|

|
15/11/2021 - moniteurautomobile.be
Sous le coup d'une enquête sur son
Autopilot, Tesla retire la dernière version bêta de son système de
conduite 100 % autonome en raison de problèmes logiciels moins de 24
heures après son lancement.
|

|
27/10/2021 - flotauto.com
L'Ifpen va pouvoir tester les piles à
combustible à hydrogène pour les bus et camions grâce à son
nouveau banc d'essais.
|

|
12/11/2021 - sciencedirect.com
A growing number of research attempts have
been made to enhance our knowledge about the characteristics of the
potential early Autonomous Vehicle (AV)…
|

|
14/11/2021 - ncbi.nlm.nih.gov
This study examined the relationship between
social cohesion and the perceived interest in, the usefulness of, and
the ease of use of an instructor-based driver assistance system in a
sample of older adults. With the aging of the population, the use of
...
|
|
|
12/11/2021 - worldwide.espacenet.com
Systems and methods for automatically
identifying and ascertaining an estimated amount of damage at a
location by utilizing one or more autonomous vehicles, e.g., "drone"
devices, to autonomously capture data of the location and utilizing
Artificial Intelligence (AI) logic modules to analyze the captured
data and construct a 3-D model of the location.
|
|
|
12/11/2021 - worldwide.espacenet.com
The present invention relates to the
guidance of autonomous vehicles and in particular, relates to guiding
an autonomous vehicle along a roadway by means of active devices with
a system which works during normal and inclement weather as well as
under any luminous conditions. These active devices are embedded in
the passive and/or active road details such as traffic signs, traffic
lights, warning lights etc. These active devices provide data
relating to road conditions, speed, road layout etc. as well as other
information such as availability of parking spaces. Accordingly,
through networks of sensors and devices the autonomous vehicle can
obtain road details in real-time in any weather, illumination,
visibility etc.
|
|
|
12/11/2021 - worldwide.espacenet.com
High definition maps for autonomous vehicles
are very high resolution and detailed, and hence require storage of a
great deal of data. A vehicle computing system provides multi-layered
caching makes this data usable in a system that requires very low
latency on every operation. The system determines which routes are
most likely to be driven in the near future by the car, and ensures
that the route is cached on the vehicle before beginning the route.
The system provides efficient formats for moving map data from server
to car and for managing the on-car disk. The system further provides
real-time accessibility of nearby map data as the car moves, while
providing data access at optimal speeds.
|
|
|
12/11/2021 - worldwide.espacenet.com
In one embodiment, a system identifies a
road to be navigated by an ADV, the road being captured by one or
more point clouds from one or more LIDAR sensors. The system extracts
road marking information of the identified road from the point
clouds, the road marking information describing one or more road
markings of the identified road. The system partitions the road into
one or more road partitions based on the road markings. The system
generates a point cloud map based on the road partitions, where the
point cloud map is utilized to perceive a driving environment
surrounding the ADV.
|
|
|
12/11/2021 - patentscope.wipo.int
A method, computer program product, and
computing system for receiving situational data from an
infrastructure system; processing the situational data to identify
one or more AV-impacting conditions; generating AV instructions
based, at least in part, upon the one or more AV-impacting
conditions; and providing the AV instructions to one or more
autonomous vehicles.
|
|
|
12/11/2021 - patentscope.wipo.int
Described herein are various systems and
processes for predictive operating assistance of vehicles. The
systems and techniques described herein may be applicable to vehicles
such as vehicles operated by a driver, semi-autonomous vehicles,
and/or autonomous vehicles. The assistance techniques described
herein may be predictive. That is, the techniques allow for the
prediction of non-optimal or dangerous operating conditions before
the vehicle control is compromised. Accordingly, a warning may be
provided and/or operation of the vehicle may be changed based on the
predictive assistance determinations. In certain embodiments, the
techniques described herein may provide warnings to a driver, may
detect faults within the vehicle, may aid in route planning, may
detect obstacles proximate to the vehicle, and/or may aid in the
operation of the vehicle.
|
|
|
12/11/2021 - patentscope.wipo.int
A method and system for improving
performance of a fleet of autonomous vehicles against malicious
trickery. Said improving comprises training of artificial neural net
component of self-driving vehicle computer to reliably identify
roadside/roadway trickery.
|
|
|
20/10/2021 - worldwide.espacenet.com
A method of controlling one or more robotic
devices, such as autonomous vehicles using neural networks, to
perform a task. A first neural network determines information about
environmental conditions relating to the task. Second neural network
206 and the information about the environmental conditions are used
to help control the one or more robotic devices when carrying out the
task. The information may include a logical state describing the
environmental conditions. The second neural network may determine
actions to help control the devices when carried out. The
environmental conditions may include unexpected events. The neural
networks may generate one or more loss values using which they are
trained. The environmental conditions may be determined based on
sensor data obtained by environmental sensors 214 such as cameras,
navigation sensors, GPS sensors, RADAR sensors, LIDAR sensors, or
inertial sensors.
|
|
|
27/10/2021 - worldwide.espacenet.com
Aspects of the disclosure relate to testing
predictions of an autonomous vehicle relating to another vehicle or
object in a roadway. For instance, one or more processors 120 may
plan to maneuver a first vehicle 100 autonomously to complete an
action and predict that a second vehicle 680, 780, 880 will take a
responsive action. The first vehicle is maneuvered towards completing
the action in a way that would allow the first vehicle to cancel
completing the action without causing a collision between the first
vehicle and the second vehicle, and in order to indicate to the
second vehicle or a driver of the second vehicle that the first
vehicle is attempting to complete the action. Thereafter, when the
first vehicle is determined to be able to take the action, the action
is completed by controlling the first vehicle autonomously using the
determination of whether the second vehicle begins to take the
particular responsive action.
|
|
|
27/10/2021 - worldwide.espacenet.com
A method of on-vehicle active learning for
training a perception network of an autonomous vehicle is provided.
The method includes steps of: an on-vehicle active learning device,
(a) if a driving video and sensing information are acquired from a
camera and sensors on an autonomous vehicle, inputting frames of the
driving video and the sensing information into a scene code assigning
module to generate scene codes including information on scenes in the
frames and on driving events; and (b) at least one of selecting a
part of the frames, whose object detection information satisfies a
condition, as specific frames by using the scene codes and the object
detection information and selecting a part of the frames, matching a
training policy, as the specific frames by using the scene codes and
the object detection information, and storing the specific frames and
specific scene codes in a frame storing part.
|
|
|
10/11/2021 - worldwide.espacenet.com
No abstract available
|
|
|
10/11/2021 - worldwide.espacenet.com
No abstract available
|
|
|
10/11/2021 - worldwide.espacenet.com
The invention relates to a
computer-implemented method (600) of training a machine learnable
function, such as an image classifier or image feature extractor.
When applying such machine learnable functions in autonomous driving
and similar application areas, generalizability is important. To
improve generalizability, the machine learnable function is rewarded
for responding predictably at a layer of the machine learnable
function to a set of differences between input observations. This is
done by means of a regularization objective included in the objective
function used to train the machine learnable function. The
regularization objective rewards a mutual statistical dependence
between representations of input observations at the given layer,
given a difference label indicating a difference between the input
observations.
|
|
|
10/11/2021 - worldwide.espacenet.com
The present application discloses a
perception data detection method and apparatus, which relate to the
field of autonomous driving and vehicle-road collaboration in the
field of intelligent transportation. The specific implementation
scheme is: acquiring labeled data and perception data, where the
labeled data includes a labeled position and a labeled type of at
least one first obstacle, and the perception data includes a
perception position and a perception type of at least one second
obstacle; performing, according to a negative sample in the labeled
data, rough filtering on the second obstacle in the perception data
to obtain a third obstacle remaining after the rough filtering, where
the negative sample is a non-physical obstacle; determining a
matching relationship between the third obstacle and the negative
sample, and determining the negative sample having the matching
relationship with the third obstacle as a target obstacle; and
determining, according to the number of the target obstacle and the
number of the first obstacle, a detection result of the perception
data. According to the negative sample in the labeled data, the
detection result of the perception data is determined, which can
effectively ensure the comprehensiveness of the detection.
|
|
|
07/10/2021 - worldwide.espacenet.com
In various examples, systems and methods are
disclosed that preserve rich, detail-centric information from a
real-world image by augmenting the real-world image with simulated
objects to train a machine learning model to detect objects in an
input image. The machine learning model may be trained, in
deployment, to detect objects and determine bounding shapes to
encapsulate detected objects. The machine learning model may further
be trained to determine the type of road object encountered,
calculate hazard ratings, and calculate confidence percentages. In
deployment, detection of a road object, determination of a
corresponding bounding shape, identification of road object type,
and/or calculation of a hazard rating by the machine learning model
may be used as an aid for determining next steps regarding the
surrounding environment—e.g., navigating around the road debris,
driving over the road debris, or coming to a complete stop—in a
variety of autonomous machine applications.
|
|
|
07/10/2021 - worldwide.espacenet.com
A method for training a model for generating
simulation data for training an autonomous driving agent, comprising:
analyzing real data, collected from a driving environment, to
identify a plurality of environment classes, a plurality of moving
agent classes, and a plurality of movement pattern classes;
generating a training environment, according to one environment
class; and in at least one training iteration: generating, by a
simulation generation model, a simulated driving environment
according to the training environment and according to a plurality of
generated training agents, each associated with one of the plurality
of agent classes and one of the plurality of movement pattern
classes; collecting simulated driving data from the simulated
environment; and modifying at least one model parameter of the
simulation generation model to minimize a difference between a
simulation statistical fingerprint, computed using the simulated
driving data, and a real statistical fingerprint, computed using the
real data.
|

|
12/11/2021 - sciencedirect.com
Mobility monitoring in urban environments
provides valuable insights into pedestrian and vehicle movement.
Understanding the causes and effects of cha…
|

|
12/11/2021 - ieeexplore.ieee.org
With the rapid development of 5G,
intelligent vehicles have gradually entered the market. Obstacle
detection is a very important part in the realization of intelligent
vehicle. Millimeter wave radar is an important perceptron for vehicle
obstacle detection. In order to avoid the problem that millimeter
wave is seriously blocked by metal objects, and to meet the vehicle
road cooperation mechanism, an active obstacle detection method based
on millimeter wave radar base station is proposed, which greatly
improves the detection range of radar The obstacle detection can
realize the sensing and detection of more than 200 meters, and the
position information of the small ball model can be clearly seen
through the two-dimensional imaging of radar echo data obtained by
simulation. Through the communication between the base station and
the intelligent car and the car signal processing system, the
obstacle detection function can be realized.
|

|
12/11/2021 - mdpi.com
In order to improve vehicle control safety
in intelligent and connected environments, a fuzzy drive control
strategy is proposed. Through the fusion of vehicle driving data, an
early warning level model was established, and the fuzzy control
method was used to obtain the appropriate torque command under the
vehicle condition; torque optimization processing was performed
according to the different corresponding vehicle following
characteristics. The control strategy was tested and verified on an
established platform. Based on the experimental results, compared
with the traditional drive strategy in one-way front and rear
following scenarios, the vehicle avoided excessive opening and
closing of the accelerator pedal when the distance between vehicles
was close, maintained the correct distance in the following
situation, and had better dynamic response when the distance between
vehicles was large, indicating that the proposed drive strategy had a
better real-time and security performance.
|
|
|
12/11/2021 - ncbi.nlm.nih.gov
With the rapid development of Artificial
Intelligent algorithms on Computer Vision, 2D object detection has
greatly succeeded and been applied in various industrial products. In
the past several years, the accuracy of 2D object detection has been
dramatically ...
|

|
13/11/2021 - sciencedirect.com
Vehicle automation, along with vehicle
electrification and shared mobility, may transform the existing
transportation if they are handled properly. However, they may create
unintended consequences if the current market dominance of fossil
fuel and privately-owned vehicles persists, and travel patterns and
transportation policies remain unchanged. The extent of these
potential benefits and unintended consequences depends on the
expected AV adoption process, people's preferred vehicle powertrain,
and AV-related policy and infrastructural support. …
|

|
13/11/2021 - tandfonline.com
The COVID-19 pandemic has hastened the
adoption of autonomous vehicles (AVs) to minimise human-to-human
contact. Yet, prior investigations suggest that AVs are
accident-prone when they behave differently from humans. It is
necessary to design an autonomous vehicle system (AVS) that can take
human behaviour into account. This study capitalises on the wealth of
data from traffic accidents caused by humans and discovers
association rules to improve AVSs. Findings show that fatal accidents
likely co-occur with "right near", "head on" or "lane side swipe"
scenarios. They provide important implications for designing traffic
scenarios that are critical for training an AVS.
|

|
13/11/2021 - ideas.repec.org
Downloadable! Full automation Autonomous
Vehicle technology (AV), is announced as possible, and safe, in the
future. Widespread deployment would deliver sharp reductions in
accidents and parking needs, two boons for society, particularly in
cities. AV's role in total travel, hence congestion, energy and
emissions is ambiguous, possibly negative. Relieving drivers from
driving, better serving those unable to drive, will strain the
system. Unless shared AVs reduce vehicle ownership (difficult,
uncertain), increase sharing and do not tempt people away from Public
Transportation – calling for planning, taxing and subsidizing.
Otherwise, less cost, more convenience might double traffic.
|

|
13/11/2021 - link.springer.com
|

|
13/11/2021 - mdpi.com
The quickly rising development of autonomous
vehicle technology and increase of (semi-) autonomous vehicles on the
road leads to an increased demand for more sophisticated
human–machine-cooperation approaches to improve trust and
acceptance of these new systems. In this work, we investigate the
feeling of discomfort of human passengers while driving autonomously
and the automatic detection of this discomfort with several model
approaches, using the combination of different data sources. Based on
a driving simulator study, we analyzed the discomfort reports of 50
participants for autonomous inner city driving. We found that
perceived discomfort depends on the driving scenario (with discomfort
generally peaking in complex situations) and on the passenger
(resulting in interindividual differences in reported discomfort
extend and duration). Further, we describe three different model
approaches on how to predict the passenger discomfort using data from
the vehicle's sensors as well as physiological and behavioral data
from the passenger. The model's precision varies greatly across the
approaches, the best approach having a precision of up to 80%. All of
our presented model approaches use combinations of linear models and
are thus fast, transparent, and safe. Lastly, we analyzed these
models using the SHAP method, which enables explaining the models'
discomfort predictions. These explanations are used to infer the
importance of our collected features and to create a scenario-based
discomfort analysis. Our work demonstrates a novel approach on
passenger state modelling with simple, safe, and transparent models
and with explainable model predictions, which can be used to adapt
the vehicles' actions to the needs of the passenger.
|
|
|
14/11/2021 - ncbi.nlm.nih.gov
Drivers' take-over intention is important
for the design of the automated driving systems and affects the
safety of automated driving. This study explored the influence
factors on drivers' take-over intention during conditionally
automated ...
|
|
|
14/11/2021 - ieeexplore.ieee.org
There should be a complex driving
environment formed by manned and unmanned vehicles with highly
uncertain and dynamic interaction when autonomous vehicles enter
actual traffic flow. Autonomous vehicles need to detect and analyze
the movement of surrounding vehicles to make safe driving decisions.
This paper proposes a Clustering Convolution-LSTM (CC-LSTM) vehicle
trajectory prediction model which is made up two modules: Clustering
module and Convolution-LSTM (C-LSTM) module. In order to find
spatial-temporal features in vehicles trajectory, a clustering
algorithm is proposed. Input data are constructed with temporal
information by choosing the optimal history trajectory length. The
convolution LSTM network layer extracts the spatial features of the
trajectory and then make the trajectory prediction. Two modules are
trained by different features data and combined. Simulation shows
that the CC-LSTM prediction model with surrounding vehicle
interaction information and selected features can meet the real-time
and accuracy requirements of prediction.
|

|
14/11/2021 - sciencedirect.com
Semi-autonomous transportation systems are
an intermediate step towards full automation of transportation
systems. They use and benefit from the techn…
|
|
|
11/11/2021 - ieeexplore.ieee.org
There should be a complex driving
environment formed by manned and unmanned vehicles with highly
uncertain and dynamic interaction when autonomous vehicles enter
actual traffic flow. Autonomous vehicles need to detect and analyze
the movement of surrounding vehicles to make safe driving decisions.
This paper proposes a Clustering Convolution-LSTM (CC-LSTM) vehicle
trajectory prediction model which is made up two modules: Clustering
module and Convolution-LSTM (C-LSTM) module. In order to find
spatial-temporal features in vehicles trajectory, a clustering
algorithm is proposed. Input data are constructed with temporal
information by choosing the optimal history trajectory length. The
convolution LSTM network layer extracts the spatial features of the
trajectory and then make the trajectory prediction. Two modules are
trained by different features data and combined. Simulation shows
that the CC-LSTM prediction model with surrounding vehicle
interaction information and selected features can meet the real-time
and accuracy requirements of prediction.
|
|
|
12/11/2021 - ieeexplore.ieee.org
Camera and LIDAR are both important sensor
modalities for real-world applications, especially autonomous
driving. The sensors provide complementary information and make
sensor fusion possible. However, the progress of early-fusion for
both modalities is very slow due to the limitations of viewpoint
misalignment, feature misalignment and data volume alignment, so that
its performance is also very low. In this work, we propose a novel
fusion pipeline: an early-fusion method of range image and RGB image
to enhance 3D object detection. It takes full advantage of LIDAR’s
range view, point view, bird’s eye view, and RGB view of the
camera: First, it uses a large-scale 2D detection data set to
pre-train a 2D detection network for extracting high-level semantic
features from the RGB image; Second, it uses a specially designed 2D
convolution network to extract high-level geometric features from the
range image; Third, it fuses the semantic and geometric features
through the point view of point clouds; Finally, the point view is
transferred to bird’s eye view for 3D object detection. Both the
range image and the RGB image are front views, so the multi-modal
features are more matched. Experiments show that the proposed method
has large improvements on the method of using only the point cloud,
and outperforms the state-of-the-art methods on the self-built actual
data set. In ablation, we study the dependence of the fusion method
on 2D features and the effect of different fusion positions on the
performance.
|
|
|
11/11/2021 - ieeexplore.ieee.org
The main objective of this paper was to
effectively interface object detection based on Convolution Neural
Networks (CNNs) with selective lossy image compression techniques to
improve the efficiency of subsequent image operations and reduce the
memory requirement for storing the images in autonomous applications
of self-driving vehicles. Object detection and localization was
performed using 2 state-of-the-art CNN based models from the
Tensorflow 2.0 Object Detection API - Faster R-CNN ResNet152 V1
$1024\times 1024$ and CenterNet HourGlass104
$1024\times 1024$. Lossy Image Compression centred around
the most prominent detected object (which is preserved) is done
through 3 techniques - K-Means Clustering (KM), Genetic Algorithm
(GA), Discrete Cosine Transform (DCT). The compressed and preserved
parts were recombined to produce the final image. Analysis of the
results obtained from different models and compression techniques was
carried out. It was found that DCT produced the best results on both
the models.
|
|
|
12/11/2021 - ieeexplore.ieee.org
The rapid growth in the Autonomous Vehicle
(AV technology calls for increased attention towards road safety
recently. Particularly, higher number of road accidents occur when
the AV tries to overtake or change the lane. To cut down the number
of accidents and improve traffic reliability, the AV should be
capable of taking intelligent decisions and communicate with other
AVs. Therefore, in this paper a Cooperative Collision avoidance
scheme for AVs at Overtaking and Lane Changing maneuver (CCAV-OLC is
proposed. The Inverse Reinforcement Learning (IRL in CCAV-OLC scheme,
process on the given number of expert demonstrations for
automatically acquiring the reward function, and thereby imitating
actual human driving strategy and decisions. However, the
adaptability of IRL to high-dimensional AV environment restricts the
performance of the CCAV-OLC scheme. To overcome this, the IRL in
CCAV- OLC leverages the Gaussian Process (GP regression model
(IRL-GP, which enables data-efficient Bayesian prediction even when
the number of demonstrations is very low. After taking intelligent
decisions in overtaking and lane changing maneuver, the AVs
cooperatively communicate and exchange the decisions with each other
by 6th Generation Vehicle-to-Everything (6G- V2X communications,
which further improves the accuracy and lessens the time taken for
making optimal decisions. The experimental results show that the AVs
clone the experts optimal driving strategy and avoids the collisions
to a greater extent
|
|
|
11/11/2021 - ieeexplore.ieee.org
With the aim to reduce car accidents,
autonomous driving attracted a lot of attentions these years.
However, recently reported crashes indicate that this goal is far
from being achieved. Hence, cost-effective testing of autonomous
driving systems (ADSs) has become a prominent research topic. The
classical model-based testing (MBT), i.e., generating test cases from
test models followed by executing the test cases, is ineffective for
testing ADSs, mainly because of the constant exposure to
ever-changing operating environments, and uncertain internal
behaviors due to employed AI techniques. Thus, MBT must be adaptive
to guide test case generation based on test execution results in a
step-wise manner. To this end, we propose a natural language and
model-based approach, named LiveTCM, to automatically execute and
generate test case specifications (TCSs) by interacting with an ADS
under test and its environment. LiveTCM is evaluated with an
open-source ADS and two test generation strategies: Deep Q-Network
(DQN)-based and Random. Results show that LiveTCM with DQN can
generate TCSs with 56 steps on average in 60 seconds, leading to 6.4
test oracle violations and covering 14 APIs per TCS on average.
|
|
|
|